| dc.date.issued | 2017-11 | |
| dc.identifier.uri | http://hdl.handle.net/20.500.11777/3887 | |
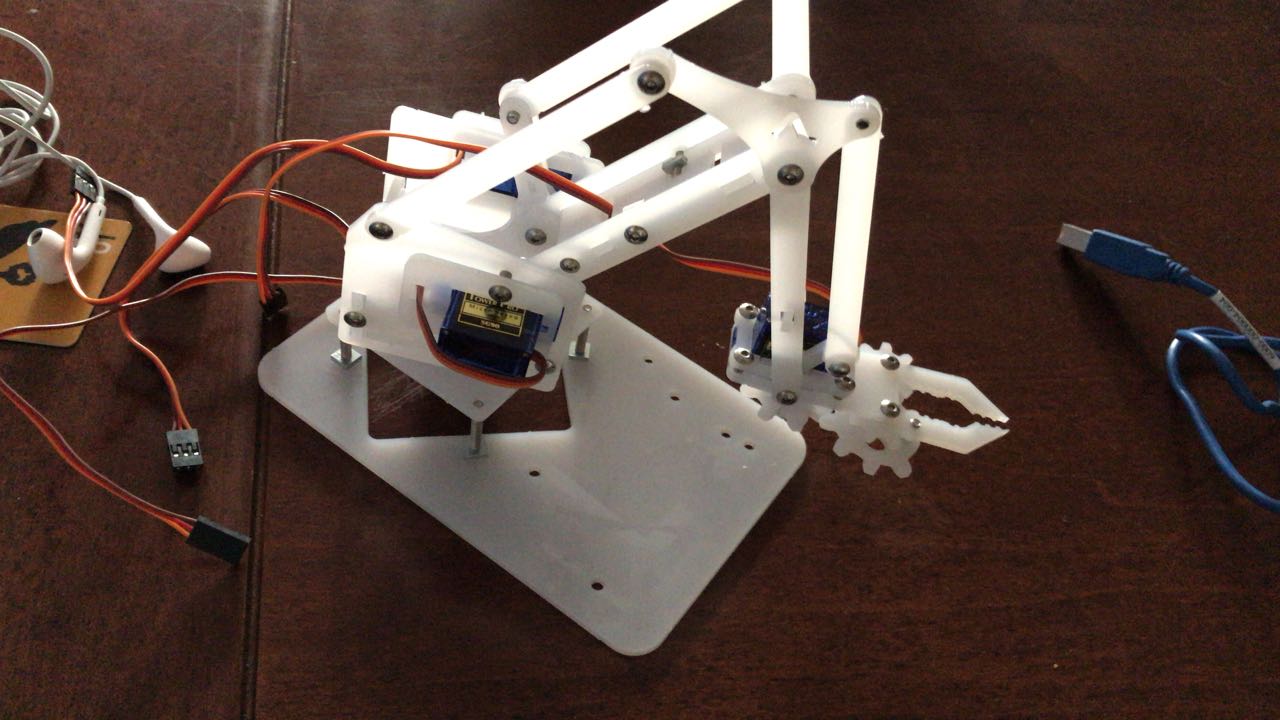
| dc.description.abstract | Este trabajo consiste en un prototipo de brazo robótico, el cual se manipula desde una tarjeta de Arduino 1 y cuatro servos motores, con un diseño y construcción de tres grados de libertad. Nuestro prototipo funciona mediante una corriente directa de 6volts y una interfaz electrónica con arduino para el control de posición conectada al puerto paralelo de nuestra computadora la programación para la automatización y movimiento que es proporcionada por el Arduino 1. | es_MX |
| dc.language.iso | Español | es_MX |
| dc.rights.uri | Atribución-NoComercial CC BY-NC | |
| dc.subject | Brazo robótico | es_MX |
| dc.subject | Programación | es_MX |
| dc.subject | Arduino uno | es_MX |
| dc.subject | Servo motores | es_MX |
| dc.subject | Fuente de poder | es_MX |
| dc.title | Construcción de un prototipo de brazo robótico manipulado con Arduino 1 | es_MX |
| dc.type | Artículo | es_MX |
| dc.contributor.author | Pérez Díaz, Aldo Alexis | |
| dc.contributor.author | Macías Lazcano, Miguel Ángel | |
| dc.contributor.author | Vázquez Chávez, Eduardo | |
| dc.date.accessioned | 2018-11-29T00:16:49Z | |
| dc.date.available | 2018-11-29T00:16:49Z | |