Construcción de un prototipo de brazo robótico manipulado con Arduino 1

Fecha de publicación
2017-11Metadatos
Mostrar el registro completo del ítemResumen
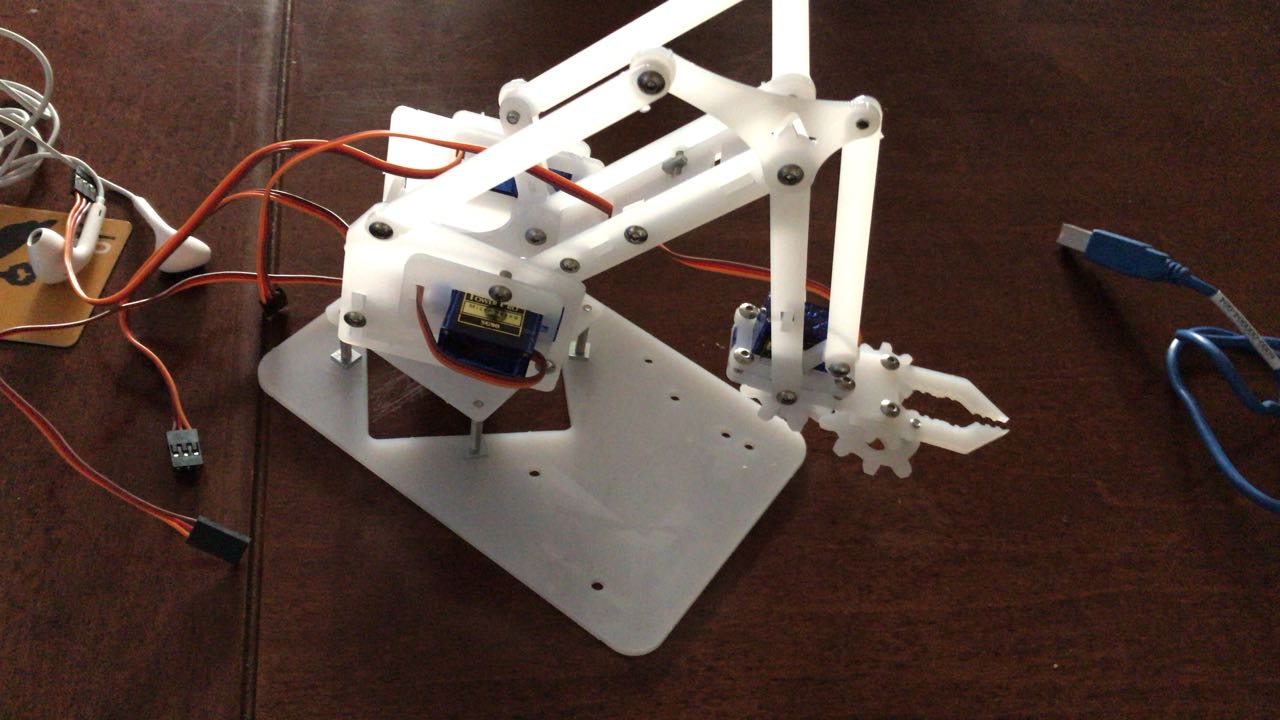
Este trabajo consiste en un prototipo de brazo robótico, el cual se manipula desde una tarjeta de Arduino 1 y cuatro servos motores, con un diseño y construcción de tres grados de libertad. Nuestro prototipo funciona mediante una corriente directa de 6volts y una interfaz electrónica con arduino para el control de posición conectada al puerto paralelo de nuestra computadora la programación para la automatización y movimiento que es proporcionada por el Arduino 1.
Colecciones:
- Otoño 2017 [35]
Artículo
Código QR